
Дочь занимается изготовлением украшений из полимерной глины и как-то пришла ко мне с просьбой. Хочу, говорит, снимать рекламные ролики своих изделий на видео, и публиковать их в Инстаграме.
После уточнения всех её хотелок и нескольких экспериментов были сформированы примерные требования к проекту «видеосъемка для интернета»:
- Съемка видео должна выполняться с использованием штатива (в противном случае на видео заметны движения оператора)
- Требуется поворотный стол для экспозиции небольших предметов (так как камера располагается на штативе, а необходимо показать изделия со всех сторон).
- Съемка должна вестись на камеру мобильного телефона, т.к. одно из мест для публикации, это Instagram, в котором опубликовать видео можно только с мобильника
Собственно, после этого и начинается курьезная история о том, как я делал вращающийся предметный стол для съемок видеороликов, и что получается, когда сильно увлекаешься поиском решения, не разобравшись в сути проблемы.
Внимание, дальше картинки и видео!
Первый подход
У меня давно пылится на полке без дела старый циклоп — 3D сканер, который уже имеет круглый поворотный стол подходящего размера.

Изначальная конструкция сканера рассчитана на ручную сборку, поэтому за пару вечеров он превратился вот в такой компактный вращающейся предметный столик.

В моей версии сканера используется кастомная плата, аналогичная плате Ардуино Nano, но на ней дополнительно установлен драйвер шагового двигателя и ключи для управления лазерами.
Посмотрел документацию на драйвер, вызвонил нужные пины у микроконтроллера и накидал несколько строк кода, в которых захардкодил вращение шагового двигателя с одной постоянной скоростью на микрошаге.
За исходник сейчас не ручаюсь, может быть там были и другие таймауты, но суть в том, что это простейший код, в котором нет ничего интересного
#include <Arduino.h>
#define DIR 13
#define STEP 12
#define ENABLE 9
void setup() {
pinMode(DIR, OUTPUT);
pinMode(STEP, OUTPUT);
pinMode(ENABLE, OUTPUT);
digitalWrite(ENABLE, LOW);
digitalWrite(DIR, LOW);
}
void loop() {
digitalWrite(STEP, LOW);
delayMicroseconds(1);
digitalWrite(STEP, HIGH);
delayMicroseconds(3000);
}
Интересное началось после съемок первых видеороликов. На видео видно неравномерное вращение предметного стола, которые создают неприятные «дергающие» эффекты.
Понятно, что такое видео больше раздражает, а не привлекает, поэтому пришлось засесть за подбор параметров вращения двигателя и опытным путем был выявлен неприятный факт.
На очень медленной скорости вращения, ниже определенного порога, становятся заметна дискретность переключения шагов. А за счет жесткой связки вала с предметным столом становятся заметны и дерганье стола, которые возникают при переключении обмоток шагового двигателя с низкой частотой.
Но, если сделать скорость вращения чуть выше порога, то визуальное дерганье пропадает, но само вращение стола становится довольно быстрым и рассматривать предметы с такой скоростью вращения становится некомфортно. В результате — первый вариант «в лоб» пришлось забраковать и думать над доработками.
Второй подход
Немного подумав, решил, что самым простым выходом в моей ситуации будет понижающий редуктор между валом двигателя и предметным столом. Пусть шаговый двигатель вращается быстро, но плавно, а за счет понижающего редуктора предметный столик будет вращаться с приемлемой для видеосъемок скоростью.
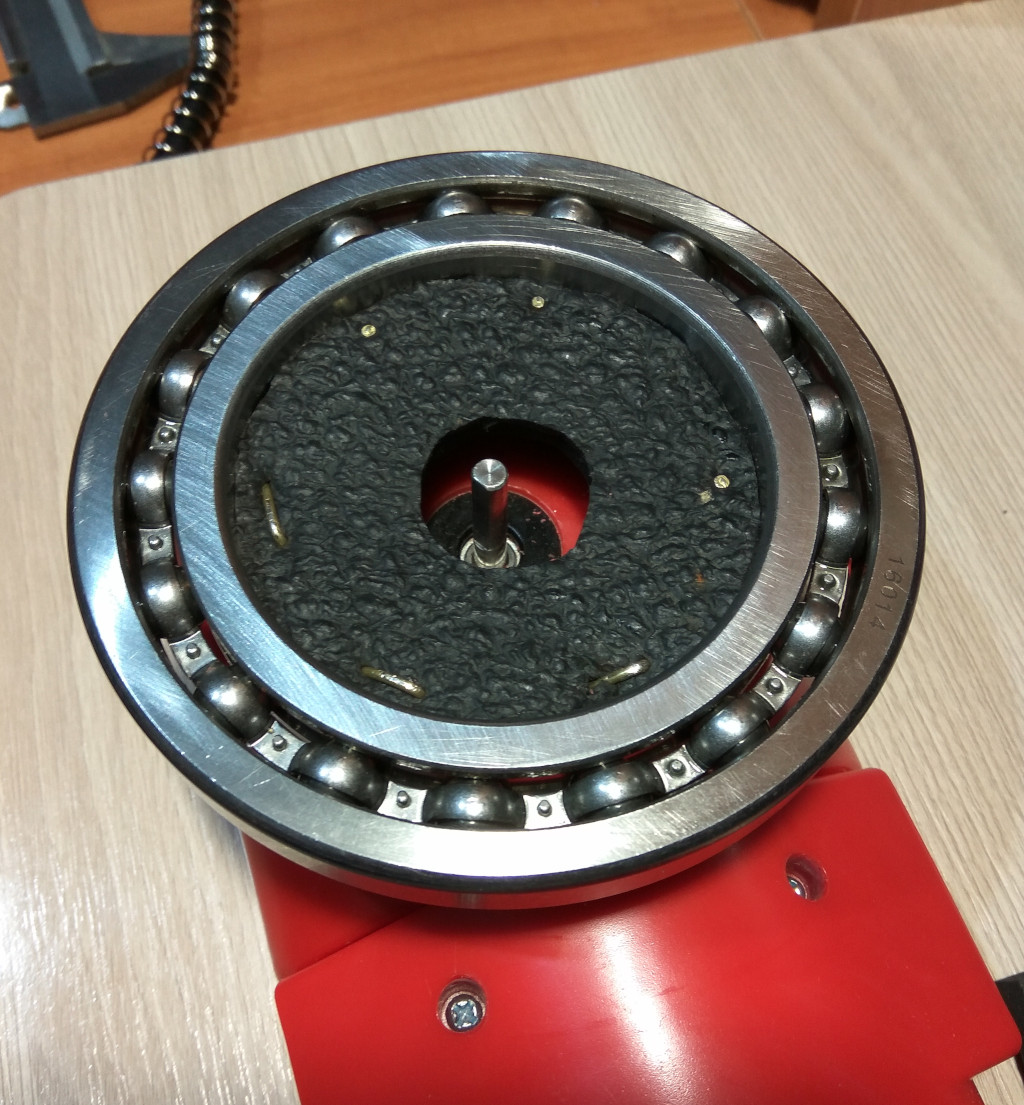
Заказывать редуктор в Китае не хотелось, чтобы потом еще и ждать несколько недель доставку, а хотелось сделать побыстрее. Но готовых миниатюрных редукторов с моем городе так же не нашлось. Поэтому изучив возможные решения на просторах интернета, остановился на понижающем hand-made редукторе из подшипника вращения. Наподобие вот такого
Небольшая сложность возникла, когда нужно было сделать торцевой упор непосредственно на шарики подшипника. Но тут на помощь пришла пластмасса, которая формуется в горячей воде прямо руками, а потом немного дорабатывается напильником.
Получилось вот такая конструкция:






Правда в итоге, толку от такого решения тоже оказалось не много.
Хотя редуктор и выполнял свою роль, а стол стал вращаться более плавно, за счет работы двигателя выше скорости «дрыганья», но нагрузку такой редуктор держал совсем мизерную. Достаточно совсем небольшого усилия, и стол останавливался или еще хуже, начинал дергаться из-за периодической потери сцепления в шарикоподшипнике.
В результате от вариант с самодельным редуктором пришлось отказаться.
Тут у меня уже включился азарт, и захотелось сделать вращающийся стол во что бы то ни стало. И если не рассматривать замену шагового двигателя или покупку редуктора, то выбор остался невелик, или попробовать доработать ПО с принципиальной схемой привода, в надежде, что удастся сделать ход шагового движка на низких оборотах более плавным (например, за счет коммутации нескольких обмоток одновременно или использования ШИМ), или установить какой нибудь демпфер для сглаживания возникающих колебаний.
Третий подход
Установка демпфера, который снижает эффект дерганья за счет своей массы, мне показалось более простым решением, чем модификация печатной платы, и я решил реализовать его в первую очередь. А потом вспомнил, что в изначальной конструкции сканера был установлен массивный шарикоподшипник в основании стола. Он скорее всего и служит как раз для этой же цели — снизить механические колебания при вращении во время работы сканера.

Обозвав себя идиотом, т.к. убрал тяжеленный шарикоподшипник из конструкции во время экспериментов с понижающим редуктором, я вернул его на место. Вращение стола действительно стало более плавным.
Решив не останавливаться на достигнутом, еще немного доработал конструкцию, заменив жесткую механическую связь вала двигателя со столом на кусок упругой резины, который должен немного гасить мелкие вибрации.
И из такой же резины сделал крепление шарикоподшипника к основанию стола — вырезал круг, размером чуть большего внутреннего диаметра, чтобы он вставал враспор, а потом
Такая конструкция с одной стороны допускает небольшой люфт и не дает предметному столу заметно дергаться, а большая масса шарикоподшипника гасит небольшие колебания.
Эпик фейл
После того, как конструкция была опробована и протестирована, я с гордостью передал предметный столик дочке на испытания, предварительно рассказав, как данным агрегатом пользоваться (вставляешь вилку в розетку и все заработает само).
Какого же было мое удивления, когда на снятом видео вместо плавного вращения так и остались заметны конвульсивные дерганья.

И только теперь мне стало понятно, что дело было не в работе шагового двигателя (хотя и ему не доставало плавности вращения), но основную часть проблем с дрыганьем на видео создавал старый мобильный телефон, который из-за небольшой производительности процессора, то ли при записи, то ли при конвертировании видео перед публикацией, автоматически преобразовывал записанный видеоролик в такой формат, что в дальнейшем при его воспроизведении даже изначально плавное вращение становилось дерганным.
В результате, проблема плавного вращения на видеороликах решилась заменой старого мобильного телефона на новый, который снимал видеоролики с более высоким качеством (хотя и на новом телефоне иногда проскакивают «дрыгающие» эффекты).
Эпилог
Эта история случилась более года назад. Я долго думал, стоит ли рассказывать, как чрезмерно увлеченный человек может искать решение надуманной проблемы, в ней не разобравшись.
Но потом решил, что финал истории все таки поучительный, ведь конечная цель достигнута и все остались довольны! (я много вечеров занимался решением интересной задачи, а дочь получила новый мобильный телефон и возможность снимать видеоролики).
А то, что «дурная голова рукам покоя не дает», может быть у каждого. Самое главное не зацикливаться на случившимся конфузе, а спокойно отнестись к этому и сделать соответствующие выводы.
